
Page 17 - ITM Jahresbericht 2020
P. 17
Aktuelle Forschung – Professur für Textiltechnik
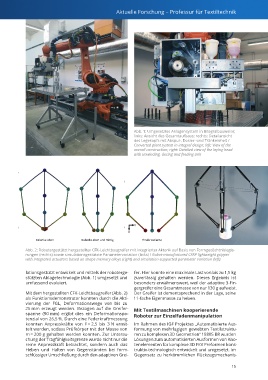
Abb. 1: Umgesetztes Anlagensystem in Integralbauweise;
links: Ansicht des Gesamtaufbaus; rechts: Detailansicht
des Legekopfs mit Abspul-, Dosier- und Tränkeinheit /
Converted plant system in integral design; left: View of the
overall construction; right: Detailed view of the laying head
with unwinding, dosing and feeding unit
Gelenke oben Gelenke oben und mittig Finale Variante
Abb. 2: Robotergestützt hergestellter CFK-Leichtbaugreifer mit integrierter Aktorik auf Basis von Formgedächtnislegie-
rungen (rechts) sowie simulationsgestützte Parametervariation (links) / Robot-manufactured CFRP lightweight gripper
with integrated actuators based on shape memory alloys (right) and simulation-supported parameter variation (left)
lationsgestützt entwickelt und mittels der roboterge- fer. Hier konnte eine maximale Last von bis zu 1,5 kg
stützten Ablagetechnologie (Abb. 1) umgesetzt und zuverlässig gehalten werden. Dieses Ergebnis ist
umfassend evaluiert. besonders erwähnenswert, weil der adaptive 3-Fin-
gergreifer eine Gesamtmasse von nur 130 g aufweist.
Mit dem hergestellten CFK-Leichtbaugreifer (Abb. 2) Der Greifer ist dementsprechend in der Lage, seine
als Funktionsdemonstrator konnten durch die Akti- 11-fache Eigenmasse zu heben.
vierung der FGL, Deformationswege von bis zu
25 mm erzeugt werden. Bezogen auf die Greifer- Mit Textilmaschinen kooperierende
spanne (90 mm) ergibt dies ein Deformationspo- Roboter zur Einzelfadenmanipulation
tenzial von 26,5 %. Durch eine Federkraftmessung
konnten Anpresskräfte von F = 2,5 bis 3 N ermit- Im Rahmen des IGF Projektes „Automatisierte Aus-
telt werden, sodass Prüfkörper mit der Masse von formung von mehrlagigen gewebten Textilstruktu-
m = 200 g gehalten werden konnten. Zur Untersu- ren zu komplexen 3D Geometrien“ 18805 BR wurden
chung der Tragfähigkeitsgrenze wurde nicht nur die Lösungen zum automatisierten Ausformen von Kno-
reine Anpresskraft betrachtet, sondern auch das tenelementen für komplexe 3D FKV Preformen kons-
Heben und Halten von Gegenständen bei form- truktiv-technologisch entwickelt und umgesetzt. Im
schlüssiger Umschließung durch den adaptiven Grei- Gegensatz zu herkömmlichen Rückzugsmechanis-
15