
Page 18 - ITM Jahresbericht 2020
P. 18
Jahresbericht 2020
men an Textilmaschinen z. B. für die Herstellung von chenden Leitelementen zwischen dem Spulengatter
Handtüchern, bei denen für die Ausbildung der Pol- und Arbeitsstelle der Textilmaschine vorgelegt. Der
schlingen im Frottee-Gewebe alle nicht polbildenden Roboter greift und zieht die Fäden dann um dem
Fäden um den gleichen Wegbetrag zurückgezogen entsprechenden Wegbetrag (Abb. 3). Mit der Integ-
werden, erfordert die Ausformung von komplexen ration des Roboters in die Webmaschine entfällt der
3D Geometrien das Zurückziehen einer Vielzahl von Prozessschritt des Positionierens des textilen Halb-
Fäden in unterschiedlichen Längen. Nur dadurch zeuges zum Roboter und es wird eine höhere Präzi-
können diese komplexen 3D-Strukturen ausgeformt sion in der Ausformung erzielt. Weiterhin wird nicht
werden. Bisher erfolgte das Ausformen der Preform die gesamte erzeugte textile Struktur selbst mani-
im Labor in aufwendiger manueller Arbeit. Dazu puliert (wie in der 3D-Flechttechnik), sondern aus-
wurde zuerst das auszuformende Gewebeteilstück gewählte Fäden oder Fadengruppen, wodurch die
vom Warenwickel geschnitten und auf einen Aus- Gewebe zu wesentlich komplexeren dreidimensio-
formkern gezogen. Nach dem Fixieren auf dem Aus- nalen Strukturen ausgeformt werden können. Somit
formkern werden die einzelnen flottierenden Fäden können nachgelagerte Preformingschritte vollstän-
am Rand des Textils durch die Fläche gezogen bis die dig eliminiert und die Prozesssicherheit und Produk-
Flottungen geschlossen sind. Mit dem Einsatz eines tivität der Preformherstellung gesteigert werden.
Roboters ist es erstmals möglich, diesen Ausform- Die im IGF-Projekt erarbeitete Lösung der Integra-
prozess vollständig zu automatisieren. Die benötig- tion eines Roboters in eine Textilmaschine und die
te Ausformperipherie wird durch einen Mehrachsro- kooperierende Arbeitsweise sind in der Patentschrift
boter innerhalb der Textilmaschine dargestellt. Dem DE 10 2020 106 810 B3 „Textilmaschine und Verfah-
Roboter werden die zu ziehenden Fäden mit entspre- ren zum Herstellen einer Textilstruktur“ hinterlegt.
Ausformung Schritt I
Ausformung Schritt II
Ausformung Schritt III
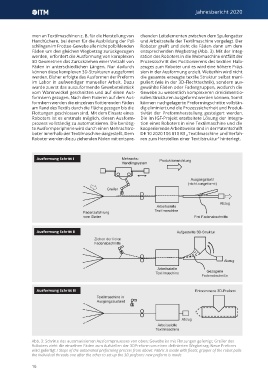
Abb. 3: Schritte des automatisierten Ausformprozesses von oben: Gewebe ist mit Flottungen gefertigt; Greifer des
Roboters zieht die einzelnen Fäden zum Aufstellen der 3DPreform um einen definierten Wegbetrag; Neue Preform
wird gefertigt / Steps of the automated preforming process from above: Fabric is made with floats; gripper of the robot pulls
the individual threads one after the other to set up the 3D preform; new preform is made
16