
Page 37 - ITM Jahresbericht 2021
P. 37
Aktuelle Forschung – Professur für Entwicklung und Montage von textilen Produkten
Abb. 6: Reinigungszeit Textil vs. Edelstahl / Cleaning time
textile vs. stainless steel
Konfektionierung
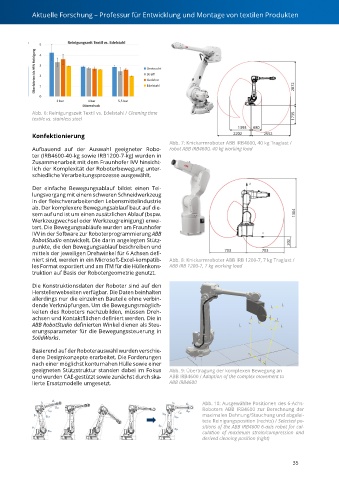
Abb. 7: Knickarmroboter ABB IRB4600, 40 kg Traglast /
Aufbauend auf der Auswahl geeigneter Robo- robot ABB IRB4600, 40 kg working load
ter (IRB4600-40-kg sowie IRB1200-7-kg) wurden in
Zusammenarbeit mit dem Fraunhofer IVV hinsicht-
lich der Komplexität der Roboterbewegung unter-
schiedliche Verarbeitungsprozesse ausgewählt.
Der einfache Bewegungsablauf bildet einen Tei-
lungsvorgang mit einem schweren Schneidwerkzeug
in der fleischverarbeitenden Lebensmittelindustrie
ab. Der komplexere Bewegungsablauf baut auf die-
sem auf und ist um einen zusätzlichen Ablauf (bspw.
Werkzeugwechsel oder Werkzeugreinigung) erwei-
tert. Die Bewegungsabläufe wurden am Fraunhofer
IVV in der Software zur Roboterprogrammierung ABB
RobotStudio entwickelt. Die darin angelegten Stütz-
punkte, die den Bewegungsablauf beschreiben und
mittels der jeweiligen Drehwinkel für 6 Achsen defi-
niert sind, werden in ein Microsoft-Excel-kompatib- Abb. 8: Knickarmroboter ABB IRB 1200-7, 7 kg Traglast /
les Format exportiert und am ITM für die Hüllenkons- ABB IRB 1200-7, 7 kg working load
truktion auf Basis der Robotergeometrie genutzt.
Die Konstruktionsdaten der Roboter sind auf den
Herstellerwebseiten verfügbar. Die Daten beinhalten
allerdings nur die einzelnen Bauteile ohne verbin-
dende Verknüpfungen. Um die Bewegungsmöglich-
keiten des Roboters nachzubilden, müssen Dreh-
achsen und Kontaktflächen definiert werden. Die in
ABB RobotStudio definierten Winkel dienen als Steu-
erungsparameter für die Bewegungssteuerung in
SolidWorks.
Basierend auf der Roboterauswahl wurden verschie-
dene Designkonzepte erarbeitet. Die Forderungen
nach einer möglichst konturnahen Hülle sowie einer
geeigneten Stützstruktur standen dabei im Fokus Abb. 9: Übertragung der komplexen Bewegung an
und wurden CAE-gestützt sowie zunächst durch ska- ABB IRB4600 / Adaption of the complex movement to
lierte Ersatzmodelle umgesetzt. ABB IRB4600
Abb. 10: Ausgewählte Positionen des 6-Achs-
Roboters ABB IRB4600 zur Berechnung der
maximalen Dehnung/Stauchung und abgelei-
tete Reinigungsposition (rechts) / Selected po-
sitions of the ABB IRB4600 6-axis robot for cal-
culation of maximum strain/compression and
derived cleaning position (right)
35